Three mechanisms harnessed by riders and constrained by three cambering wheels fuel Trikke dynamics. Carving distinguishes the gait of a Trikke from most other body-powered vehicles. This undulating mechanism efficiently delivers 1) angular jetting and 2) linear pushing momentum from the rider to the Trikke. Centered below and behind the steering axis, the front guide-wheel of a Trikke articulates with the head joint, or yoke as a second-class lever. Within a fraction of a second while 3) turning it yanks the yoke into the turn transferring the trailer's angular momentum to the Trikke. A rapid turn with deep camber invokes this caster mechanism. Direct push and the more subdued involuntary castering feed into jetting, the most fundamental mechanism.
This study develops further the mathematical, dynamic Trikke locomotion model from a first principles perspective documented in the author's previous Body-Powered Trikke [Physics] article. The momentum transfer can be understood in terms of simple levers, rotations, inelastic collisions, and the Parallel Axis Theorem, all constrained by wheel friction. This effort expands the power production physics and geometry to propagation of local momenta and introduces a rider algorithm and rider scenarios modeled in a global frame. The result, a [calibrated], forward-feed, discrete Trikke dynamics computer simulation that provides many qualitative and quantitative insights into this elegant method of locomotion and exercise in investigated Trikke [behaviors].
An analysis by a daily Trikke rider
Technical sources for this effort include the Trikke patent applications, prior art patents, see [Trikke Patent], and two robotic control theory articles [RoboTrikke] and [Roller-Walker] written in 2005 and 2000, respectively. The patents assign credit for the main propulsion of the Trikke to "conservation of angular momentum", while the robotic papers attribute that role to castering; this author's designation for that phenomenon. While performing a "first principles" type of engineering analysis to derive equations suitable for simulation of the Trikke and rider experience, it became apparent that none of these sources had explored the whole picture. They seemed more interested in investigating the Trikke in the context of similarity to an atomic worm segment than as a rider-powered vehicle.
In the patents, weak appeals to "conservation" arguments were made in a context where it was more important to distinguish the mechanical aspects of the invention rather than how a rider produces motion. Indeed, arguments concerning spinning ballerinas and arm positions are not satisfying and far from convincing. As acknowledged in the robotics articles, the Trikke is a nonholonomic system; one which involves constraints that are not conservative. In particular, a decrease in the turn radius does increase the angular acceleration by conservation of angular momentum, in the absence of friction. However, by the same conservation law, it is well known that this alone cannot add any angular momentum to the system as implied in the patents.
In the [RoboTrikke] project, a low-fidelity, ill-proportioned model Trikke was controlled robotically via castering with mixed results. Control equations grouped Trikke propulsion with that of the [Roller-Walker]. A second set of control equations simulated a token rider by "leaning" an elevated weight side-to-side across the two back wheels. An effect of this weak carving input was noted in their computer simulations, but was not attempted in the robot. However, the greater effects due to "jetting" and "slinging" the Trikke and rider's center of masses in opposite directions nearly parallel to the main axis was not addressed. Even the Roller-Walker should perform better using these modes of input, though it would be more difficult to coordinate than on a Trikke. In other work, the same authors show that a bike can carve [CarveABike] without peddling using a combination of carving-like motion and "balancing" to throw rider momentum along the path of the front wheel. The main issue was stability. A Trikke is intrinsically more stable.
In this present work, equations are derived describing the geometry and motion of the steering mechanism, the load moved by carving Extended-Trikke, the load moved by castering trailer and the wheels. A configurable digital robot model controls basic Trikke input without feedback. Equations expressing the local Trikke-Rider System (TRS) dynamics were previously derived by the author in a [physics] article and are implemented in the simulation. Trikke mechanical linkages allow the local frame to be embedded into the global, so that global placement and kinematics are addressed.
Program architecture is of little consequence to this descriptive effort. A simple simulation loop with a constant time step is all that is required to implement these models. There is no need for feedback or other control events. Better frameworks can likely be employed using Runge-Kutta algorithms, etc, but the results converge quite well without them.
A configuration file containing the detailed physical description of the Trikke, its subsystems, rider and simulation goals drives the simulation. Important internal and real-world measurable results are logged for each subsystem in the local Trikke coordinate frame and the global "lab" frame. Various forms of graphical or numerical analysis portray insights into the qualitative and quantitative data. Several behavioral scenarios are put forward including single input factor runs and coasting; the subject of the author's Trikke [behaviors] paper.
A Useful Model
A model becomes useful when it increases understanding that leads to better use, control or enjoyment of the target process or activity. A model often doesn't need to be measurably accurate to demonstrate differences that resolve questions, but must at least be qualitatively similar. By following physical and mathematical principles, it is posited that this model is at least qualitatively similar to a real Trikke. [Calibration] of simulated Trikke rides to real ones have brought the results of this model into the realm of reasonable quantitative accuracy.
Inputs to the Trikke model include:
the rider's mass, mR
the rider's steering angle limits, limθ
the rider's cambering angle limits, limγ
the rider's center of mass position limits, limψ and limψy
the rider's twist expressed around the Trikke's guide-wheel contact point, vσρ
the rider's steer/camber cycle time, τ
the time taken to turn the steering column (stem) to the other side, σ
Exploration of dynamic variables made possible by the simulation via graphics.
Some dynamic model design choices:
While solving for the contact point of the front wheel is inherently a 3-D proposition, only actions in the horizontal plane are considered for the Trikke frame. For example, there is a slight vertical displacement of the yoke when the front wheel is turned. While not difficult to compute, the resulting change in frame angle was not considered large enough to affect the dynamics significantly.
Body linkages (arms and legs) are not considered explicitly in the robot-rider model. 2-D input functions pattern steering, cambering, and the position of the rider's center of mass in a plane parallel to the road. However, because the rider's moment of inertia tensor changes with relative hand and foot placement, the motion of the handlebars and exact position of the foot decks are represented. Note, the rider's "twist" around his own center of mass is modeled. There is a "natural" twist due to pushing with the "outside" foot, which the rider can easily enhance with downward motion and hip action - see "jetting".
Wheel slippage is not considered. The contact "patch" is considered a point contact. Camber thrust is not computed. Rather than generally applying D'Alembert's principle to the wheel constraints and incorporating them into an equation of motion via "virtual work" or other technique, they are assumed in the formulation of the mathematical models, greatly simplifying the derivations and simulation.
A second-degree polynomial friction model was employed and [calibrated]. Though inclines and wind are not included in the model, the calibration study points to an elegant method for accomplishing this at a later time.
What is the model used for? Computer models give details of behaviors that are difficult or impossible to measure in real life. They are often used to compare the resulting behavior of subtle changes in parameters or sequences of inputs that would not be easy or economical to test for otherwise. In short, hypotheses can be tested and sometimes resolved that are not practical or possible to test in the real world.
Issues that can be addressed by models like this one, but not necessarily in this article, include:
How does a Trikke really work?
If castering contributes to Trikke locomotion, how much might it contribute?
Strategies (i.e., coordination of inputs) to produce the most drive impulse in different situations.
Assessment and comparison of field trial measurements with model results.
Can the Trikke be improved by changing its geometry?
Might some Trikke riders have physical characteristics that give them riding advantages?
There are many other avenues of possible exploration, including Design of Experiment DoE screening and modeling studies that can estimate the subtle advantages of various Trikke configurations and rider techniques.
Definitions
Simulation
A model constructed to demonstrate some aspect of a problem that typically encompasses familiar activities or properties of the model domain.
"All models are wrong, but some are useful." - [George Box], British statistician, 1976.
One reason this model of a Trikke might be wrong is because it is "simple". Details and physical processes that do not contribute to the more visible aspects of its dynamics are not addressed. Development and simulation of the model documented in this article are presented in the text at a conceptual level. Appendix A contains the detailed math and simulation models. Each has various parameters, independent and dependent variables which are defined in the pages where they are used.
Steering and Cambering
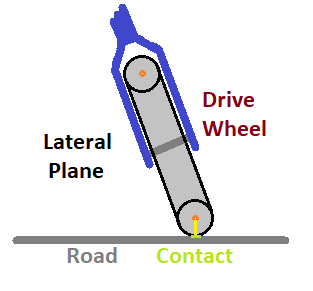
Figure 4 - Lateral Plane Guide-Wheel Contact
To simulate a trikke and rider system, the effect of the steering angle θ, and cambering angle γ, on the path of the guide-wheel must be known. Define the guide-wheel path ray with its origin at the wheel's contact point in a direction parallel to the intersection of the wheel's lateral plane with the road; see Figure 4. Locate the wheel's contact point by identifying the shortest vertical line from the minor radius of the toriodal wheel model to the road. In real life, the contact is a patch or a few of them if there is still a tread pattern on the wheels. Patches change geometry and deformation with turning and cambering that can affect the wheel path by torques and forces resulting in effects like camber thrust. Such patch properties are not a part of this model.
Tread Contact Points:
The tread contact points of the Trikke were measured in the neutral position. Structural points and the physical quantities needed to determine these positions from geometry were also measured. These included the articulation points needed to propagate changes in the Trikke's structure affecting the tread contact points as steering and camber are applied.
In the neutral position, the contact points (x, y, z) from the yoke origin in the local coordinate frame, LCF, are:
Table 1: Neutral Position Contact Points (inches)
Front contact
C͆σ = (3, 0, -14.81)
Right contact
C͆R = (-35, -10.375, -14.81)
Left contact
C͆L = (-35, 10.375, -14.81)
Note: the bridge symbol p͆ indicates a vector position measured from the origin of a coordinate frame, as opposed to an attached vector, r̚ (ray), or unattached vector, v̅.
To determine these contact points from the input steering angle, θ, and cambering angle, γ, in the local coordinate frame, a guide-wheel contact model was developed.
The first two columns show an extreme sequence of γ and θ for one complete sweep cycle. The next three columns are the local coordinates of the contact point beneath the yoke. These contact points are rarely in the middle; y = 0. They are also higher than the neutral contact point at -14.812 z. This indicates that the Trikke tilts forward a bit (Td) at the left and right edges of each sweep. Yoke is held constant in the animation at world coordinates (0.0.0) and a shadow helps emphasize the height gap of more than an inch and a half from the ground.
The rear wheels of a Trikke do not steer, but camber at the same angle as the guide-wheel. The steering model used with θ = 0 produces the rise and fall of the rear wheel contact points due to cambering alone. In the animation, the rear wheels are kept on the ground (not shown) so the ground rises and falls by the amount dictated by cambering. The sweep shown in the animation is not the same as that in the table; both are for illustrative purposes only.
Drive Generation
A body-powered Trikke is driven by a virtual second-degree lever as elucidated in Trikke [Physics]. Riders control the free end of the lever via the handlebars of the steering column and forward forces they intentionally generate by shifting their body's center of mass and rotating into the guide-wheel path. Changes in stem angles alter the guide-wheel path and the magic lever's turn-radius, which vary the forward leverage on the TRS center of mass to carve. These same stem angle changes alter the triangle between the guide-wheel contact, the yoke and the transom, producing small, forward caster impulses.
Impulses are changes in momentum, due to applying a force over time. The force typically starts out stronger and then tails off. It acts vigorously over a very short period of time - fractions of a second. Expending a particular amount of energy in a shorter time, the greater the force and impulse it creates - the greater the change in momentum. When the mass of a system remains the same during its operation, then momentum can be thought of as velocity, v̅, and impulse as change in velocity, Δv̅ (as in orbital mechanics). The greater the impulse, the greater the Δv̅ and therefore the greater v becomes! Many people find the trikke difficult to learn because they do not grasp how to produce a coordinated sequence of periodic motions that drive the Trikke. This is understandable, the movements can be quite subtle to the casual observer.
Simulated Trikke Components
Simulated agents produce locomotion by their dynamic actions with each other. Impulses, momentum transfer, forces, rotation all have a source agent and recipient agent according to Newton's 2nd Law. Something pushes and something else gets pushed. Something pulls, something else gets pulled. Generally, both rotation and translation result depending on the relationships of the force vectors and the agents' centers of mass. See Vector Decomposition in Appendix C for an illustration. The Trikke has two pairs of reaction agents that are not totally independent.
Each of these main components is broken into subparts. The subparts are also broken down. Eventually, "irreducible" parts make up the subparts. In this simulation these are shaped like cylinders and blocks. Each has mass, a center of mass, position, moment of inertia tensor, geometry and a few other properties necessary to build up a dynamic picture of what is happening to them. By composing the properties from irreducible to main component, the credibility of the geometry and physics is maintained in the "solid" models in the usual ways.
The Steering Column, or stem, is the first of 3 simulated components that has a profound effect on the locomotion of the Trikke. Most importantly, the stem wheel guides the Trikke, channeling all of its momentum into the trajectory of that wheel. It also creates two weak impulses. When the guide-wheel turns from a non-zero steering angle toward 0° then past it, castering first pulls the trailing frame and rider into the turn giving them angular momentum. As the turn completes, it is released in a weak jet. Parts of the rider - hands and wrists - are essentially part of this extended steering column.
The second component of the model is the afore mentioned Trailer. It is composed of the parts of the Trikke and rider that get rotated and pulled by the castering action of the steering column; Caster-Pull. The remaining parts (steering column with its guide-wheel, rider's hands and part of the forearms) are pushed slightly forward via the trailer by the second impulse generated by the steering column, the Caster-Push.
Component number three compliments the motive mass of the rider in carving. Part of the rider's mass travels with the Trikke, while the remainder moves quickly in the opposite direction. Parting the two centers of mass slings the Trikke along the guide-wheel path. The compliment of the rider's motive mass is the Extended-Trikke. It is composed of all of the parts of the Trikke and those of the rider that are essentially stationary with respect to the Trikke. This is the part of the TRS that gets slung forward when the rider quickly shifts his center of mass backward into the turn resulting in a Direct-Push.
The rider's body core is the fourth component. Most of the rider's body participates in slinging the Extended-Trikke. Hands, feet, part of the forearms and lower leg do not contribute their mass to slinging. Rather they get slung, and are thus considered part of the Extended-Trikke.
These components and their dynamic interactions produce the Trikke locomotion drive actions. They are presented in the Trikke [Physics] article. These drive interactions include:
Jetting (rider's intentional rotation in carving)
Direct-Push (rider's intentional forward sling and latteral lean in carving)
Caster-Pull and Push (frame linkage's response to turning and cambering)
2nd-Degree Polynomial Friction Model
Generally, friction is modeled as:
eq 1: F = -μ Λ
where F is the friction force in Newtons; μ is a scalar (unitless) friction coefficient; and Λ is the load on the interface in Newtons.
Often, μ is a function of the velocity at the interface. For dry interfaces, μ might be modeled as a constant a. With bearings, the model may include a direct velocity component multiplied by a coefficient b. Wind and other fluids operating on the interface often introduce a v2 dependence scaled via a coefficient c.
In a separate empirical study [calibrated], the author determined the following friction model for his T-78 Air Deluxe; eq 2. It is used in the simulation to make the model's kinematic results quantitatively match those of his Trikke. The friction model coefficients may be different for other Trikkes, but they should all have the same basic characteristics and ranges similar to those shown in Figure 7 below.
This one-dimensional friction model is easily extended to three, where the mass, m, is that of the load supported by the wheels and the vectors align with the path of each wheel to which it is applied.
eq 3: F̅ = -(0.14968462 - 0.13434041 |v̅| + 0.03134038 v̅· v̅) m g ρ̚
Strictly speaking, eq 3 is not a completely accurate way to implement this friction model. The main speed-limiting term in v̅· v̅ applies more to the "whetted" frontal area of the entire Trikke than to individual wheel fluid dynamics. It was nevertheless implemented this way to keep the model simple. Also, the resistance due to wheel spin-up and assistance due to spin down, (i.e., wheel inertia), is separately estimated in this computer model, and is actually confounded in the velocity dependent term of this empirical friction model.
Adding torques as in eq 4 created by the friction force at each wheel factors into finding the center of mass friction force in eq 5. Note, r̚w is the turn-ray to each wheel contact point with w in the index set {σ i r} for the stem, left and right wheel. Likewise F̚w represents each wheel's friction.
When the Trikke is turning, the velocities of its parts are proportional to the ratio of those part's turn-rays to the center of mass with faster parts having longer turn-rays. In the simulation, the TRS velocity is changed by the ratio of the turn-rays of the guide-wheel velocity origin and the TRS center of mass. Each wheel's friction depends on its stride, load, and path unit vector, but also its turn-ray ratio when applied to the TRS center of mass. See the center of mass and friction derivations in Appendix A for details.
Trikke Path Propagation
Once the simulated Trikke has a velocity, a propagation model determines where the Trikke goes. Just like the constraints on impulse production, there are constraints on the path it can take. These constraints involve linear and angular momentum and wheel friction. Computing a local path step is not enough. So far, Trikke model discussion has focused on a local coordinate frame, LCF. Now, a Global Coordinate Frame, GCF, is needed. The LCF is embedded in the GCF by the position of the yoke in the GCF and the angle, λ, between the x-axis of the GCF and the x-axis of the LCF.
Path Propagation
There are many sources from which changes in momentum arise. Since part mass is constant, velocity deltas of the TRS center of mass are used instead of changes in momentum (impulses). Delta velocities arise from carving, castering, friction and wheel inertia. The last source is bound up with the wheel's velocity and is confounded with the velocity dependent component of friction in the empirical friction model. The simulation computes this contribution, but does not apply it to the path velocity. Moment of inertia is calculated for each wheel. A Trikke is affected by wheel inertia the same way as other wheeled vehicles - as a change in mass; so called "inertial mass". For a Trikke the ratio of maximum inertial mass to TRS mass is less than one-percent.
The total momentum from the last simulated step i was M v̚i and is now M (v̚i + Δv̚) where all the impulses and friction have been reduced to their contributions to Δv̚ at the TRS center of mass.
Placement
Digital Robot
Controlling a Trikke Simulation requires a time sequence of coordinated commands emulating a basic understanding of how a human rider controls a real Trikke. A single iteration step of the simulation can determine responses to impulses in various Trikke configurations. But for sustained travel, the following goals were implemented:
Periodic execution of control protocol.
Control variables within human operating ranges.
Limits of control and important internal variables become robot controlled inputs.
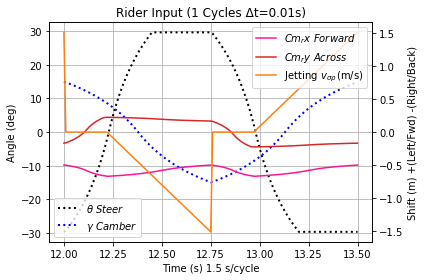
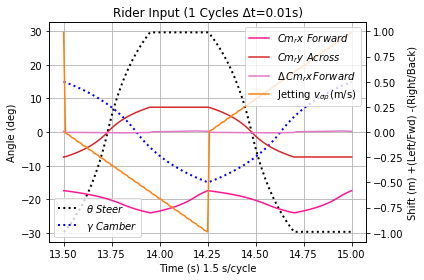
Turns out, for the purposes of exploring a Trikke's dynamics and kinematics, a feed-forward control system is all that is required. No feedback, state filters, control laws, governors, AI or goal chaining need be developed. Riding a Trikke feels simple, natural and magic because it is. Even a digital robot savant can do it. This robot implements a "bow tie-shaped" trajectory for its virtual center of mass (see Image 20 below) coordinated with steering, cambering and jetting rotation. Each control input is periodic over a set of limits. One such configuration is plotted over 3 cycles in Figure 11. Not everyone drives a Trikke this way; other drive-cycles are possible, even with this robot. It is not necessarily optimal, but it is simple.
Most parameters employ a horizontal sigmoid transition between the specified limits within their phase in the cycle. Figure 11 below shows robot model output logged for the last cycle of a typical simulation run. Only the first cycle starts out different with θ and γ set to 0.
Many of the simulation result plot types appear in the following pages. Their purpose is not an explanation of the typical carving run they portray, but to indicate what is produced by the simulation. Interpretation of the results of various simulated scenarios is the subject of Trikke Behaviors.
The following indicates how some output quantities were converted for display in the plots below.
Energy from velocity
For an output velocity v, its kinetic energy is K = M v2/2 where M is the appropriate mass.
Energy from change in position
Changes in position occur over the simulated time interval Δt. Treat the change as a velocity: K = M (Δx/Δt)2 where M is the appropriate mass.
Work from force
Starting with an output force like friction, its work is W = F λ where λ is the distance traveled in a simulated time interval Δt. The Work Energy Theorem allows work to be equated to and compared with quantities represented as energy.
Acceleration from velocity
Estimate using the interval definition for acceleration: Ɑ = (vi - vi-1)/Δt
Color Coding
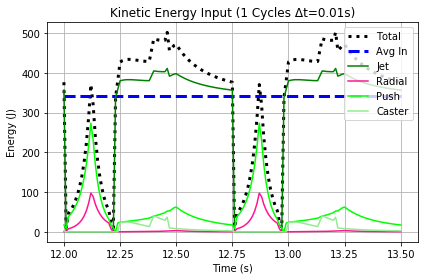
Color is used to indicate different, but related quantities in a chart. For example, in energy profiles, reddish curves portray dissipations, while greenish ones represent contributions to locomotion.
Cycles
The number of cycles covered by the plot are shown in the title. Only one cycle is needed to chart quantities with cycle patterns that don't change. Other plots run for the number of cycles needed to show a behavior pattern or reach terminal velocity or to stop.
Table 6. - Graphic Output
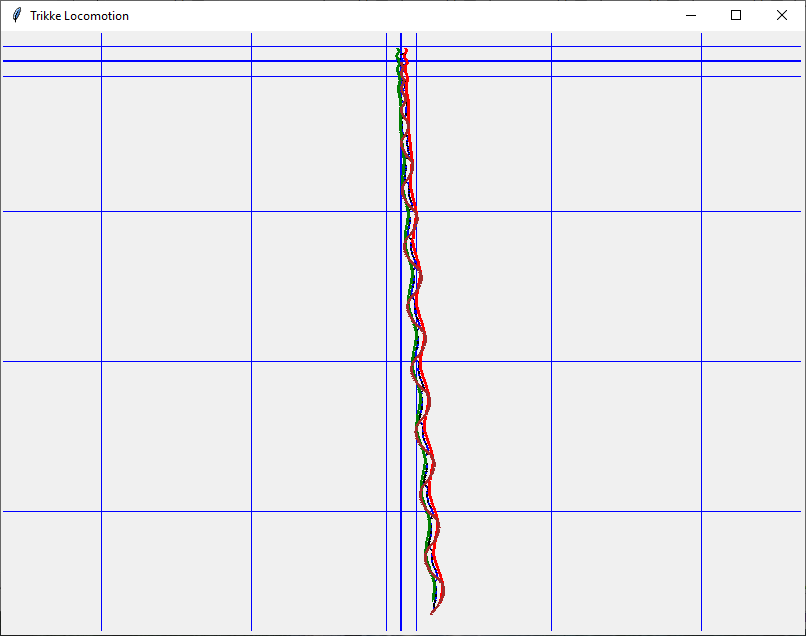
Image 1. - Wheel and Cm Tracks Full track shown. One meter between smaller spaces between lines; 10 meters between the larger spaces.
Image 2. - Magnified Tracks Track color codes: Brown - guide-wheel; Green - right wheel; Red - left wheel; Blue TRS center of mass.
Image 3. - Input Energy Compares energy input components over the trial. Robot input is static each cycle. The blue line is the average.
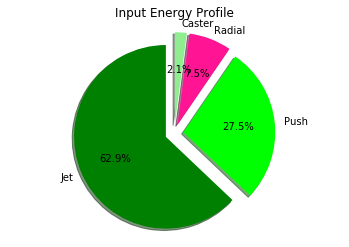
Image 4. - Input Energy Profile Compares energy input components. Some of this energy like rider recoil helps generate components that directly affect locomotion like direct Trikke push.
Image 5. - Rider's Control Input Pattern Robot steering, cambering, two dimensions of center of mass displacement and jetting on one plot. Note two vertical axes.
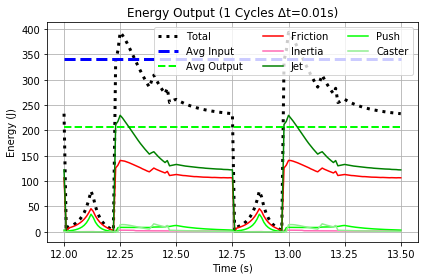
Image 6. - Output Energy Compares energy output and expenditure components. Friction is measured as work. Average input slightly above average output demonstrats most energy is accounted for.
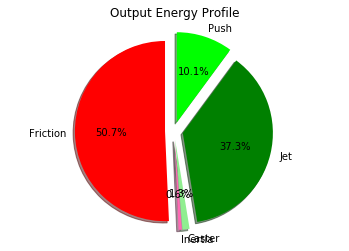
Image 7. - Output Energy Profile This pie serves up the major contributors to total energy output. For efficiency, add the greenish parts together. The reddish ones are "wasted".
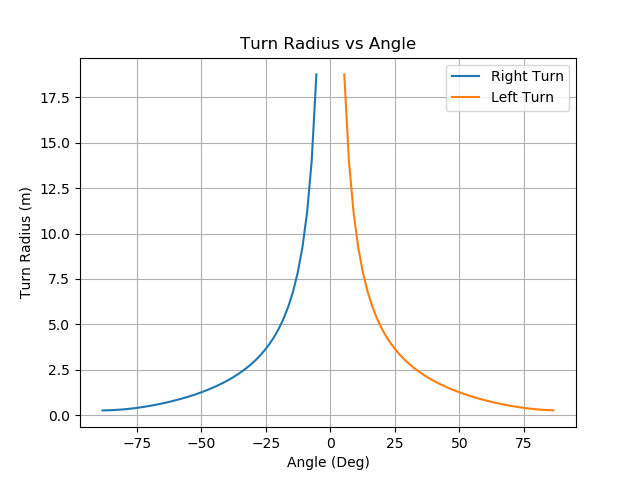
Image 8. - Turn Radius Vs. Turn Angle The turn radius depends only on the steering angle. Turn radius is infinite at 0 x.
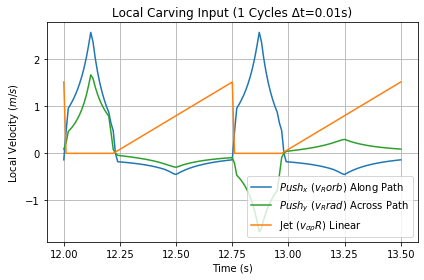
Image 9. - Carving Input Effective change in guide-wheel velocity for the rider's jetting and direct-push.
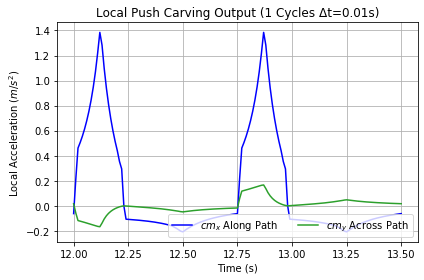
Image 10. - Carving Output Change in TRS cm velocity along (blue) and across (orange) path due to Direct-Push.
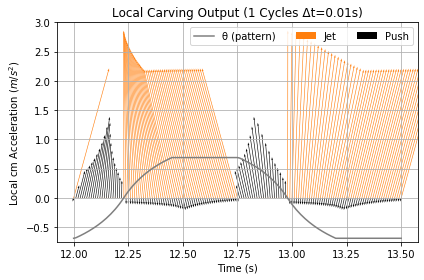
Image 11. - Carving Output Vectors Vectors showing direction and relative size of jetting (orange) vs push (black) velocities at TRS cm. Notice how straight forward they are!
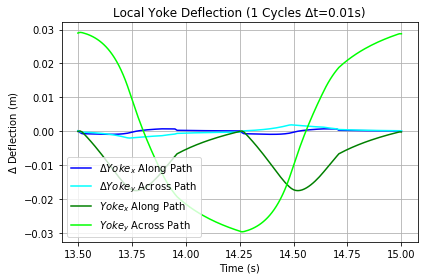
Image 12. - Local Yoke Deflection Yoke position and deflection over a cycle. This drives the separation producing caster effects.
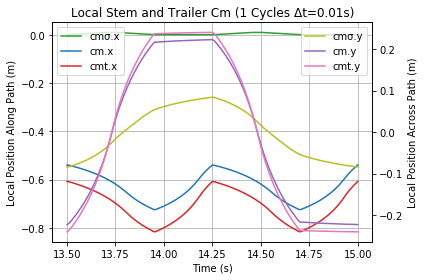
Image 13. - Local Stem and Trailer CM Center of mass positions for the stem, TRS and trailer that participate in castering effects.
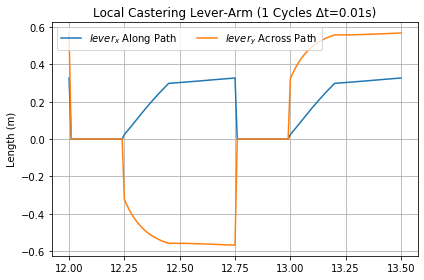
Image 14. - Castering Lever-Arm Castering dumps the trailer's orbital momentum into a jet via this lever-arm. X (blue) and y (orange) components are shown.
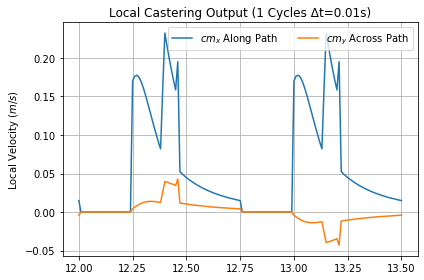
Image 15. - Castering Velocity Output Velocity at the TRS center of mass along the path (blue) and across it (orange).
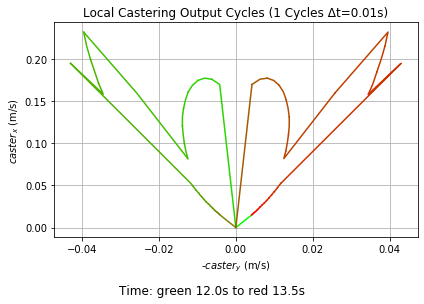
Image 16. - Castering Output Hodograph Contribution of castering to TRS cm velocity. Along and across path components plotted against eachother. Abscissa is reversed.
Image 17. - Castering Output Vectors Velocity vectors (orange) at the TRS center of mass synchronized with guide-wheel path vectors (brown) due to castering.
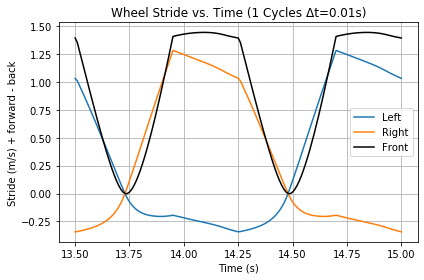
Image 18. - Wheel Stride Stride along each wheel's path. Highest on the outside of the turn. Inside stride is slightly negative.
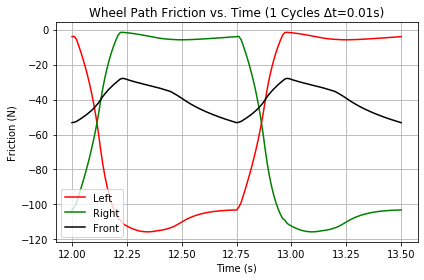
Image 19. - Wheel Friction Along Path Friction along each wheel's path. Most detracting on the inside of a turn as the rider shifts weight that way. Most weight on trailing wheels.
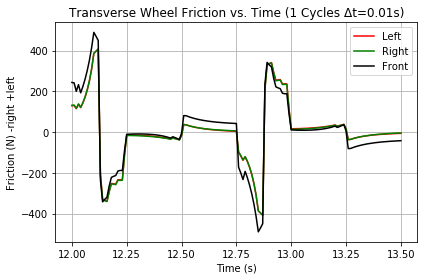
Image 20. - Wheel Friction Across Path This friction enforces the "travel in an arc" constraints.
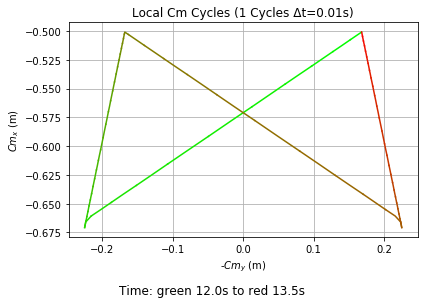
Image 21. - Local Rider Cm Hodograph The rider's "dance". Rider's center of mass position over a cycle.
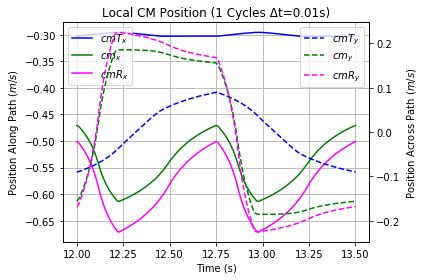
Image 22. - Local Cm Position CmT: Trikke center; Cm: TRS center; CmR: Rider center. Along the TRS center of mass path and across it.
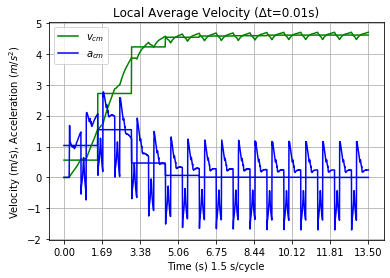
Image 23. - Local Velocity and Acceleration Instantaneous and average TRS trajectory velocity and acceleration from stop to terminal velocity.
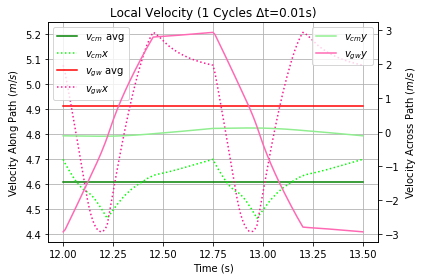
Image 24. - Local Velocity Velocity along and across their respective path vectors for TRS center of mass and the guide-wheel contact point.
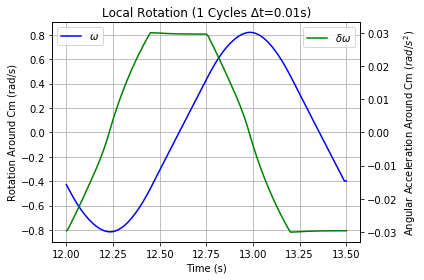
Image 25. - Local Rotation Rotation around the TRS center of mass over a cycle. ω should be symmetric around zero, but is offset due to integration of deltas beginning away from a zero-crossing each cycle.
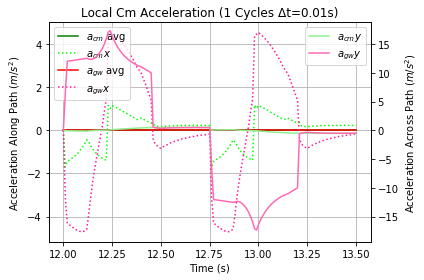
Image 26. - Local Acceleration Acceleration along and across their respective path vectors for TRS center of mass and the guide-wheel contact point.
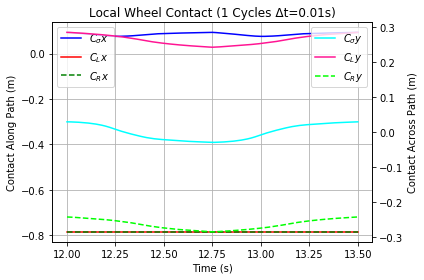
Image 27. - Local Wheel Contact Position of the wheel contact points wrt. the yoke, x-axis (along) and y-axis (across).
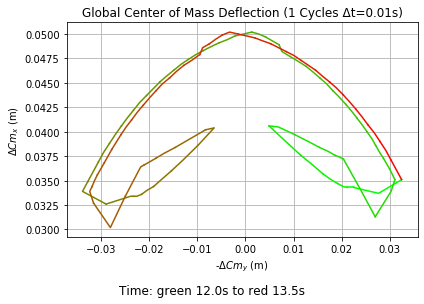
Image 28. - TRS Cm Deflection Hodograph Figure traced by changes in the TRS cm in the Global frame.
Conclusion
A calibrated dynamic Trikke simulation was developed implementing drive dynamics from a paper by this author based on first principles of [Physics], vector analysis and rider experience. Four assembly models of the Trikke-Rider System decomposed the system; steering mechanism, trailer, extended Trikke and the robot-rider. A friction model and calibration method was developed and documented in another paper. The rider was modeled as an autonomous state machine providing reasonable input to the Trikke. Sets of prototypical velocity generation parameters yielded illustrated Trikke locomotion responses. Other aspects of Trikke geometry, physics and useful mathematics are derived in the appendices below.
Some parts of the simulation are briefly documented here and used extensively in the simulation [behaviors] paper including many charts and graphs of the dynamics and kinematics of various Trikke simulation scenarios. Some show paths carved out by the Trikke under various driving scenarios, while others compare internal dynamic and kinematic variables like friction forces and velocities. One of the more interesting chart types is the "energy profile" showing how much energy is directed into or out of the various mechanisms of the Trikke model as a percentage of the total energy input by the robot or output by the system.
It is hopped this simulation and ride analyses based on the simulation will elucidate the [magic] of the ride for many readers. Riders may gain insight to improve their sport. Non-riders might be able to appreciate the synergism in its engineering and begin to understand how they too can ride a Trikke. Naturally, the best way to digest what is written here is to go for a ride!
Determining the tread contact points of a cambered and turned wheel is conceptually simple. Consider a steering column that is vertical to the ground at some point p. At p, the steering axis is at right angles to every ray drawn on the ground from that point. Turning this vertical column turns the guide-wheel. The tread of the wheel contacts the ground directly below the wheel axle. But like all bikes and motorcycles, the axle is offset from the steering axis by a distance called "rake". What makes the Trikke caster, is the rake in the opposite direction; negative rake! So, the tread contact points form a circle on the ground about the steering axis which has a radius equal to the rake.
However, the steering column of a Trikke is tilted back (head angle) toward the rider. The contact points still form a circle around the steering axis, but the plane they lie in is tilted. The steering column is normal to this plane, which intersects the ground in a line parallel to the local y-axis. When the circle on the plane is projected onto the ground it forms an ellipse that is shorter in the x-direction. See the center image in Figure 5.
Now imagine the tilted steering column to be rotated less than 45-degrees about the x-axis - Note the rear wheels rotate to the same angle. This is camber. Rotating about the x-axis, the plane intersects the ground in a line parallel to the local x-axis with the projected ellipse shortened in the y-direction. With camber and steering, the steering axis normal defines a plane that is now tilted and rotated! Its ground projection will be affected on both x and y-axes, but is still an ellipse. Figure 5 illustrates this for 5 values of camber.
The fact that the tread contact circle is projected to the ground means the rest of the trikke has to adjust for the guide-wheel and rear wheels to remain in contact with it. Due to steering, the guide-wheel "lifts" off the ground more than the rear wheels, so the Trikke dips forward while turning. This adds a slight forward displacement, "Turn-Dip", to the contact point so the steering circle no longer projects to the ground as a perfect ellipse.
The tilt angle due to dipping can be defined using C͆R or C͆L in LCF since C͆Rx = C͆Lx.
Physical geometry defines the relationship between θ, γ and ρ̑, the forward path unit vector. A vector in LCF, σ̅, represents the steering column. A toroid, rotated on edge and translated by its center to the front axle, d͆, represents the wheel. Therefore, steering along the axis turns the wheel with negative rake like a caster wheel.
A torus is specified by two radii, a and b. a is a radius normal to the torus surface ending at its enclosed center. b is a radius from the open center (hub) of the torus to its interior center.
The wheel outer radius is a + b; while the hub radius is a - b; and the tire width is 2b.
The locus of points 'a' is a ring at the center of the inner-tube, a fact that is important when finding the contact point while cambering. See Figure 4.
Turning Radius
Weight Distribution to the Wheel Axles (L1, L2, L3)
Wheel Stride
Friction
Moment of Inertia for a Trikke Wheel (Iw)
Contribution of wheel inertia to Δv
Path Propagation
Placement
Appendix B: Rider Derivations
Energy of Limb Extension
Limb extension transfers less energy to a target than an equal mass traveling at the same speed simply because it is attached to a stationary body. The end proximal to the body is stationary; no velocity. An extremity can travel quickly; it has velocity. Surprisingly, the kinetic energy expression for extending the limb is simple.
Appendix C: Mathematical Derivations
Cross Product Inverse
Vector Decomposition
Δv for Simulation
Energy Contribution of a Δv
Glossary
Camber, cambering Wheel tilt angle from vertical rotated around a wheel's forward path direction. Tilting a Trikke's steering column serving as the Camber-Lever to the left or right side creates a nearly equivalent vertical tilt in all three wheels. Foot-deck tops also angle synergistically to increase grip in a turn. For Trikkes, cambering generally refers to tilting the steering column from side-to-side coordinated with steering. Cambering enhances the effects of carving and castering.
Camber-Lever A second-class lever of the stem with fulcrum on the road and action from cambering that moves the yoke. It also interacts with the two levers involved in castering.
Camber thrust When a cambered wheel rotates, tread-particle elliptical trajectories are constrained to run straight when contacting the ground. This asymmetry causes a change in their momentum (a force) at right angles to the inside of the camber angle. This force and increasing change in camber pull the wheels into the turn avoiding dangerous wheel slips to the outside.
Carve, carving Most dictionaries don't define a sports sense of this word! [sportsdefinitions.com] does for skiing and skateboarding, basically a turn accomplished by leaning to the side and digging an edge or wheel into the path. In the case of "carving vehicles" or "CV"s, carving is a transfer of momentum from the rider to the vehicle synergistically constrained by ground forces on the wheels. The Trikke seems best engineered to claim this action as a primary form of locomotion. This motion mechanism provides action to the guide-wheel contact point around the Turn-Lever.
Caster, castering Most dictionaries don't define a sense of this word as a verb! Here, it is defined as a form of locomotion. To caster is to move by quickly turning a wheel with positive caster and positive trail back and forth to produce forward motion. The offset contact patch causes the vehicle frame head or yoke to move sideways a couple of inches pulling part of the vehicle's trailer mass into the turn. Impulse created by this motion in the direction of the drive wheel path first pulls, then pushes on the vehicle's stem assembly. It is the sideways rotation not the stem pull or push that creates a small jetting impulse. This appears to be the primary means of locomotion for the [EzyRoller], [Flicker], [PlasmaCar] and Wiggle Ride-On Car by Lil' Rider (no web presence) rider toys and one of the modes for a Trikke. Two levers mechanize this motion: the Yoke-Lever and the Trailer-Lever.
Caster angle - positive, negative The angle a steering column makes with the road. It is positive when the angle slopes up toward the back of a vehicle. It is negative otherwise.
Caster pull When the handlebars of a Trikke are turned and tilted quickly toward the center, the geometry of the steering mechanism and constraints on wheel motion, throws the yoke into the turn up to a few inches and pulls the Trikke's Extended-Stem and trailer a quarter inch or so closer together in a fraction of a second. Though the rotation is small, most of the weight of the Trikke and its rider get spun around the transom. The pull generates no immediate jetting impulse. Steering resistance increases as caster pull builds local angular momentum.
Caster-push When the handlebars of a Trikke are turned and tilted quickly away from the center, the geometry of the steering mechanism and constraints on wheel motion, throws the yoke into the turn up to a few inches and pushes the Trikke's Extended-Stem and trailer a quarter inch or so apart in a fraction of a second. As the turn reaches its limit, the built up angular momentum transforms into a jetting impulse. The rider synergistically leverages this push for speed by synchronizing carving impulses with it.
Citizen scientist An individual who voluntarily contributes time, effort, and resources toward scientific research in collaboration with professional scientists or alone. These individuals don't necessarily have a formal science background. See What is citizen science? [Citizen Science].
Conservative force A force that can be expressed as the gradient of a potential. When this is possible, the work done by the force is not dependent on the path taken. A "round trip" by different paths of the same length requires the same amount of work. Gravity is a familiar conservative force.
Design Of Experiment (DoE) A type of designed experiment contrived to efficiently identify (screen for) the control factors that affect the process being studied the most (main effects). DoE can model and compare the effects of several factors against each other using Yates analysis. It attempts to optimize the differences in effects and minimize the number of trials needed to obtain them. When models are attained they have least-squared, multilinear properties subject to the confounding structure of the experimental factors. When not attained, the true process model is non-linear.
Direct-Push and Pull, slinging Intentional impulse created as the rider quickly moves his or her center of mass in the opposite direction of the handlebars. Lightening the load on the drive wheel and pushing the Trikke forward with arms and legs feels like "slinging" the Trikke forward. In order to retain the ground gained, this maneuver must be concurrent with or followed by steering, cambering or both. During the push or pull, the mechanism produces a jetting impulse; acceleration for the push, deceleration for the pull.
Dynamics Study involving variables related to the generation of an object's motion. Answers questions about how motion is produced.
Equation of motion (EOM) Application of conservation laws or principles like least action and balance of forces and torques to produce global kinematic and other equations for a system. For example, an approach due to Lagrange starts with energy conservation, equivalences between kinetic and potential to derive system velocities, then other kinematic quantities and sometimes Newton's force-based EOMs can be derived for the system. D'Alembert's principle allows various constraints on part velocities and positions to be incorporated in some EOMs. Other approaches create state-based generalized coordinates and use lie algebras to represent system functions. While many EOMs cannot be solved symbolically, they lend themselves to numerical solutions via computer simulation.
Extended-Stem The part of the TRS that is turned by the rider during castering. Composed of the stem, hands and wrists of the rider's body. Does not include body parts considered part of the trailer. In lever systems, one-third of a linkage between two moving parts can be shown to act as if stationary with respect to the closest attachment. So, one-third of a hand and arm acts as if stationary to the stem, another third to the trailer and a third acts with the arm's own momentum.
Extended-Trikke The part of the TRS that slings during carving. Composed of hands, wrists, feet, ankles and parts of the rider's body that sling with the Trikke. The part of the reduced rider's body producing the jetting and Direct-Push impulse is not part of the Extended-Trikke. In lever systems, one-third of a linkage between two moving parts can be shown to act as if stationary with respect to the closest attachment. So, one-third of a foot and lower leg acts as if stationary to the deck, another third to the rider and a third acts with the lower leg's own momentum.
GCF Global Coordinate Frame, "lab" or "observer's" frame may contain an infinite number of LCFs twisting, moving and even changing size everywhere. The Trikke-Rider System LCF is fairly well behaved inside the GCF; it has a common z-axis and doesn't change scale. Observers can see and measure the TRS as it moves and turns and can all obtain the same values. But they can't feel the accelerations of the Trikke like the rider.
Jetting, hemijet The angular component of carving. Beyond the "natural" body twist accompanying slinging, the rider extends the foot outside the turn by lowering his center of mass, leaning back and twisting the hips into the turn. This angular impulse adds angular momentum to the system via the Parallel Axis Theorem through rotation about the TRS center of mass. The word comes from an outdated skiing technique using both feet. Technically, this is "alternating hemijetting" since each foot independently executes half of a "jet" (a hemijet) in one drive-cycle. However, it is possible to jet with both feet.
Kinematics Study involving variables related to the classification and tracking of an object's movement. Answers questions about the form and characterization of motion, not how the motion is produced.
Lateral plane An imaginary plane that separates the front half of an object from its back half. Its normal is parallel to the front-to-back axis of the object.
LCF Local Coordinate Frame, inertial frame or just local frame is the rider's world where the Trikke and everything on it seems relatively stationary compared to the rest of the world. It is "inertial" because the Trikke and rider "feel" centripetal force in a turn and the accelerations of its movement. Yet the Trikke remains close to the rider. "Forward" is pretty much ahead. There is a wheel always under the left foot. Things are local and for the most part in their expected places. When the rider measures things relative to his locality in the GCF, they are usually different than the same things measure by observers in the GFC.
MA, Mechanical Advantage A ratio, percentage or number expressing the force multiplier or efficiency of a lever system. For simple levers, it is the distance of the action to the fulcrum divided by the distance of the load to the fulcrum.
Nonholonomic system (also anholonomic) In physics and mathematics a nonholonomic system is a type of system that ends up in a different state depending on the "path" it takes. In the case of the Trikke, frictional forces and some geometric constraints restricting velocity but not position prevent the system from being represented by a conservative potential function. It is "non-integrable" and not likely to have a closed-form solution.
Normal A "normal" to a plane, is a ray starting at the plane which is at right angles to every ray in the plane that starts at the intersection point. Notice that the normal cannot lie in the plane. Its unit direction is also the "direction" or "orientation" of the plane.
Parallel Axis Theorem One of two theorems by this name. Translates a moment of inertia (moi) tied to a center of mass and rotation axis to an offset but parallel axis. If the moi is expressed as a tensor with no particular rotation axis, then it translates to an arbitrary point, usually on the object. The second namesake does the same for an angular momentum vector. There is also a theorem called the "Second Parallel Axis Theorem" which is simpler to apply in some contexts.
Reduced rider About fifteen percent of the rider's body mass acts as if it is a part of the Trikke. Hands and wrists move largely in unison with respect to the handlebars. Corresponding parts of the legs act as if part of the decks on the arms of the Trikke. This "reduces" the effective mass and distribution of the rider, while increasing that of the Extended-Trikke and Extended-Stem.
Sagittal plane An imaginary plane that separates the left half of an object from its right half. Its normal is parallel to the left-right axis of the object.
Steering column, stem The controlling mechanism surrounding the steering axis. Composed of the steering column, handlebars, rider's hands and parts of his forearms (about 1/3) as well as the yoke, front wheel, axle, bearings and attachments. It is considered part of the Extended-Trikke, but is the part of the TRS not included in the trailer. It is also a lever; the Camber-Lever.
Stride A body in motion has linear and rotational (or angular) velocity. Parts of the body have different velocities depending on their distance from the rotation center. Stride is the difference between a part's velocity and the linear velocity of the whole body at its mass center. Rotational velocity can be expressed as a linear velocity, v̅, at right angles to a radius pointing from the rotation center: (v̅ = ω̅ × r̅). When the rotation center is the turn-center of the TRS, and the radius ends at a wheel, the difference between v̅ and the TRS linear velocity is that wheel's stride.
Swath As a Trikke snakes its way along, the outer edges of the wheels trace a wide ribbon-like path down the road. At terminal velocity, if one connects the outer most edges of the wavy ribbon on both sides to get a long rectangle, the width of that outlined area is the "swath" covered by the Trikke. In simpler terms, it is the width of the path covered by the Trikke. If something is within the swath of the Trikke, there's a decent chance it will be hit depending on Trikke's trajectory.
Trailer The parts of a TRS that are rotated around the transom and pulled or pushed slightly by the Trailer-Lever while castering. Consists of the parts of a Trikke other than the steering column, front drive wheel, handlebars, "handlebar-stationary" hands and parts of the forearm (about a third of it).
Trailer-Lever Caster action is applied at the yoke by the Yoke-Lever which rotates it and pulls or pushes it. The center of mass of the trailer is its load. Its fulcrum is the Transom point. The Trailer-Lever is a second-class lever and push-rod.
Transom Used to indicate the point on the line between the rear wheel contact points with the ground acting instantaneously as the Trailer-Lever fulcrum. Its position is determined by the ratio of instantaneous friction at each wheel. Thus, when the load is nearer the left wheel, the transom point, or just transom, is nearer the left wheel. For equal friction on both wheels, it is in the center of the line between contacts.
TRS Trikke-Rider System. Refers to the entirety of the physical system composed of the Trikke, all of its relevant parts and behaviors and the rider with all relevant parts and behaviors needed to complete the current investigation. Though the road, air and other parts of the environment are required to operate the system, they are not considered part of it.
Turn-Center A Trikke orbits this stationary point at a constant radius until the steering angle is changed or a wheel slips. When steering straight, the turn-center is not defined and the turn-radius is considered infinite. Jetting makes use of the turn-ray as a second-class lever acting on the system center of mass.
Turn-Lever A turn-ray is the ray from the turn-center to a point on the Trikke. When the point is the guide-wheel contact point, the ray becomes an important motive lever as all TRS motion must move the contact point around the turn-center.
Yoke Idealized point of intersection for the three structural tubes that characterize a Trikke. This genius articulation is fairly complex and precisely manufactured. It is the soul of the Trikke - if there is one. Constant motion from steering, cambering and road vibration are robustly endured, while keeping all the wheels aligned without toe-under or splaying.
Yoke-Lever Constitutes part of the castering mechanism set in motion by turning the stem. The rotation produces an action at the yoke, which is also the load. Its fulcrum is the guide-wheel contact patch. The movement of this yoke-load acts on the Trailer-Lever which rotates it and pulls or pushes it. The Yoke-Lever is a degenerate lever.
References
Patents
[Trikke Patent] J. Gildo Beleski Jr. Cambering Vehicle and Mechanism. US Patent 6,220,612 B1. Dec 20, 2005. Google Patents US6976687B2. Prior: 1999 US09434371 Active, 2000 US09708028 Active, 2002 US10331558 Active, 2004-06-25 US10876497 Expired - Fee Related, 2004-11-18 US20040227318A1 Application, 2005-12-20 US6976687B2 Grant.
Control Theory in Robotics
[RoboTrikke] Sachin Chitta, Peng Cheng, E. Frazzoli, V. Kumar. "RoboTrikke: A Novel Undulatory Locomotion System". In Proc. IEEE Int. Conf. Robotics and Automation, pages 1597-1602, Barcelona, Spain, April 2005. DOI: 10.1109/ROBOT.2005.1570342.
[Roller-Walker] Gen Endo and Shigeo Hirose. "Study on Roller-Walker: Multimode steering control and self-contained locomotion". In Proc. IEEE Int. Conf. Robotics and Automation, pages 2808-2814, San Francisco, April 2000. DOI: 10.1109/ROBOT.2000.846453
Papers
[CarveABike] Sachin Chitta, V. Kumar. "Biking Without Pedaling". November 2006.
Chitta, Sachin. “Biking Without Pedaling.” (2006).
[Air Force] Charles E. Clauser, et al., Air Force Systems Command, Wright-Patterson Air Force Base, Ohio. August 1969. Pub AD-710 622.
[physics] Michael Lastufka, "Body-Powered Trikke Physics" June 2020.
[calibrated] Michael Lastufka, "Empirical 2nd Degree Friction Model Solution" June 2020.
[behaviors] Michael Lastufka, "Survey of Simulated Trikke Behaviors" June 2020.
[magic] Michael Lastufka, "Trikke Magic: Leveraging the Invisible" June 2020.
Other
[George Box] Box, George E. P. (1976), "Science and Statistics" (PDF), Journal of the American Statistical Association, 71: 791–799, DOI: 10.1080/01621459.1976.10480949.
 or
or  animation
animation

 US6976687B2. Prior: 1999 US09434371 Active, 2000 US09708028 Active, 2002 US10331558 Active, 2004-06-25 US10876497 Expired - Fee Related, 2004-11-18 US20040227318A1 Application, 2005-12-20 US6976687B2 Grant.
US6976687B2. Prior: 1999 US09434371 Active, 2000 US09708028 Active, 2002 US10331558 Active, 2004-06-25 US10876497 Expired - Fee Related, 2004-11-18 US20040227318A1 Application, 2005-12-20 US6976687B2 Grant.